

Содержание
Введение
1. Кинематическая схема и исходные данные
2. Кинематический расчет и выбор электродвигателя
3. Механические свойства материалов и расчет допустимых
напряжений
4. Расчет передач с определением общих размеров
5. Приблизительный расчет валов
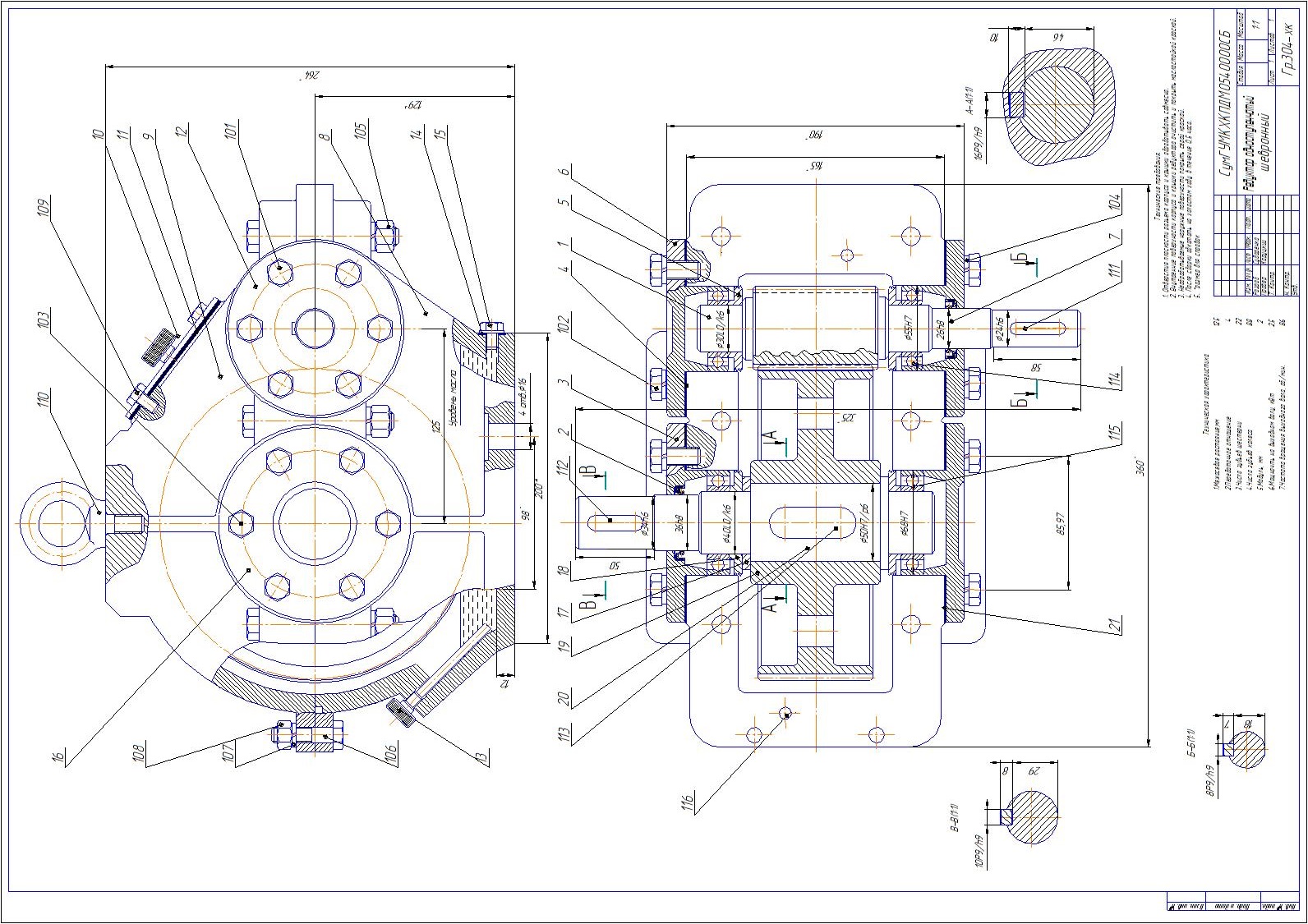
6. Выбор конструкции редуктора и его эскизная компоновка
7. Расчетные схемы валов, эпюры моментов изгиба и кручения
8. Выбор подшипников
9. Уточненный расчет валов
10. Выбор и проверочный расчет шпонок
11. Выбор посадок зубчатых колес, подшипников, крышек, муфт и других деталей. Выбор материалов для смазывания и описание системы смазывания зацеплений и подшипников
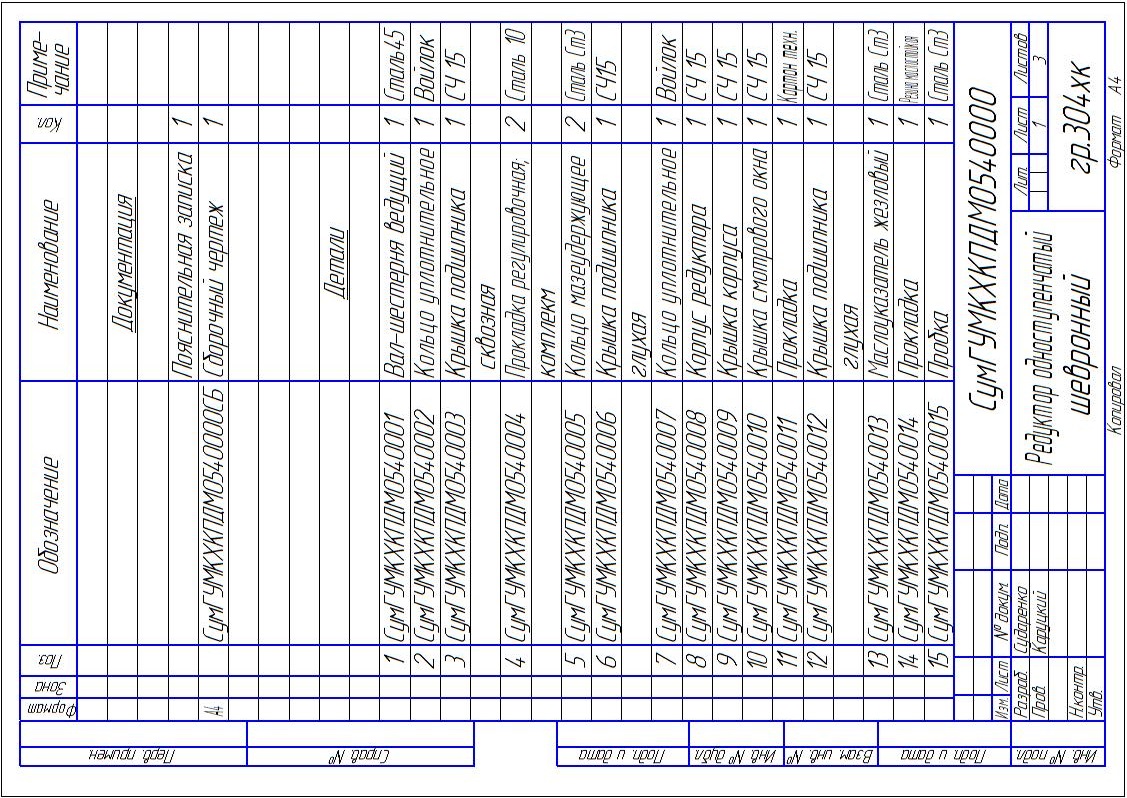
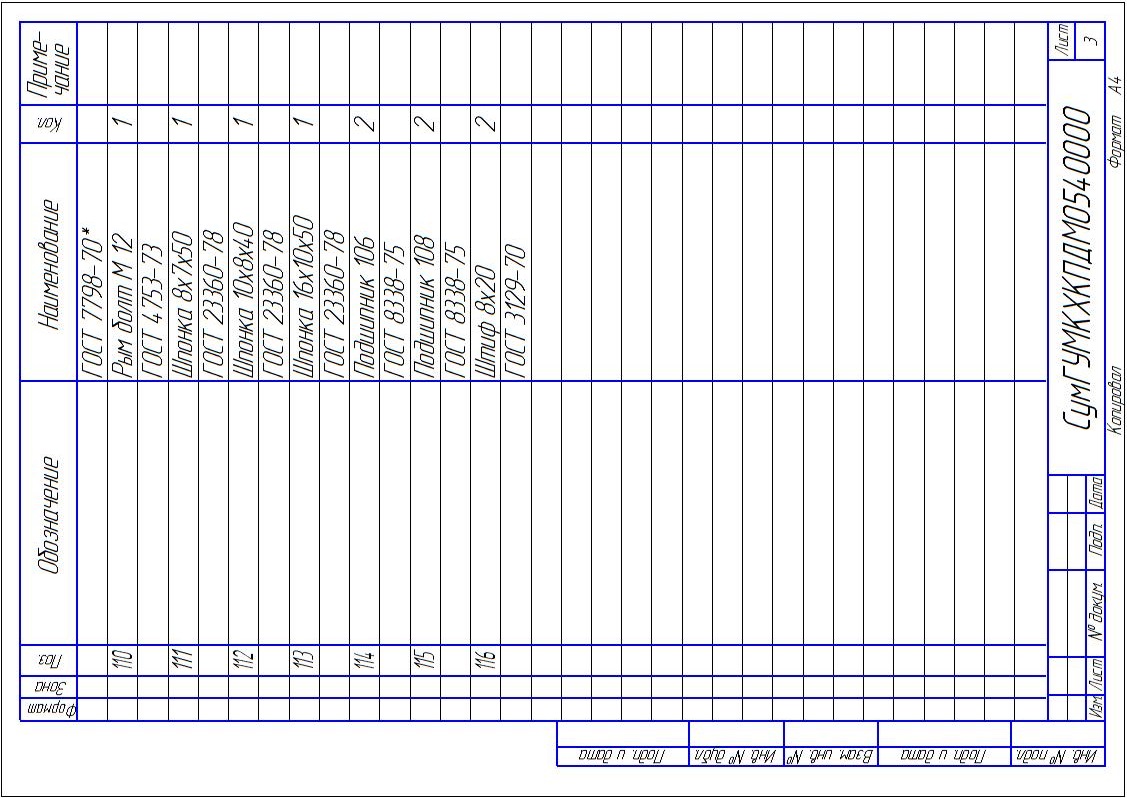
12. Описание сборки редуктора
13. Литература
14. Приложения:
15.1 Чертеж редуктора в двух проекциях
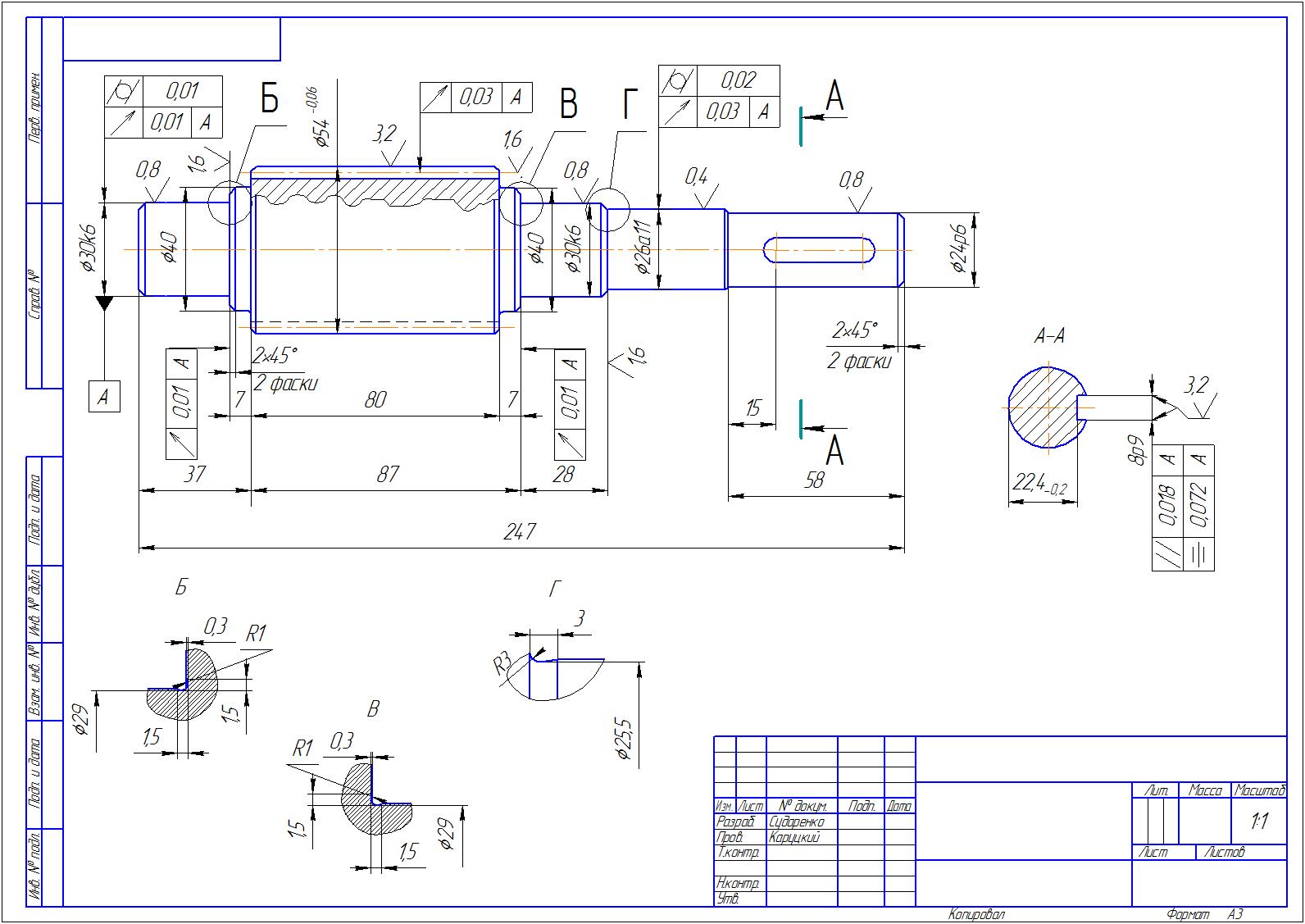
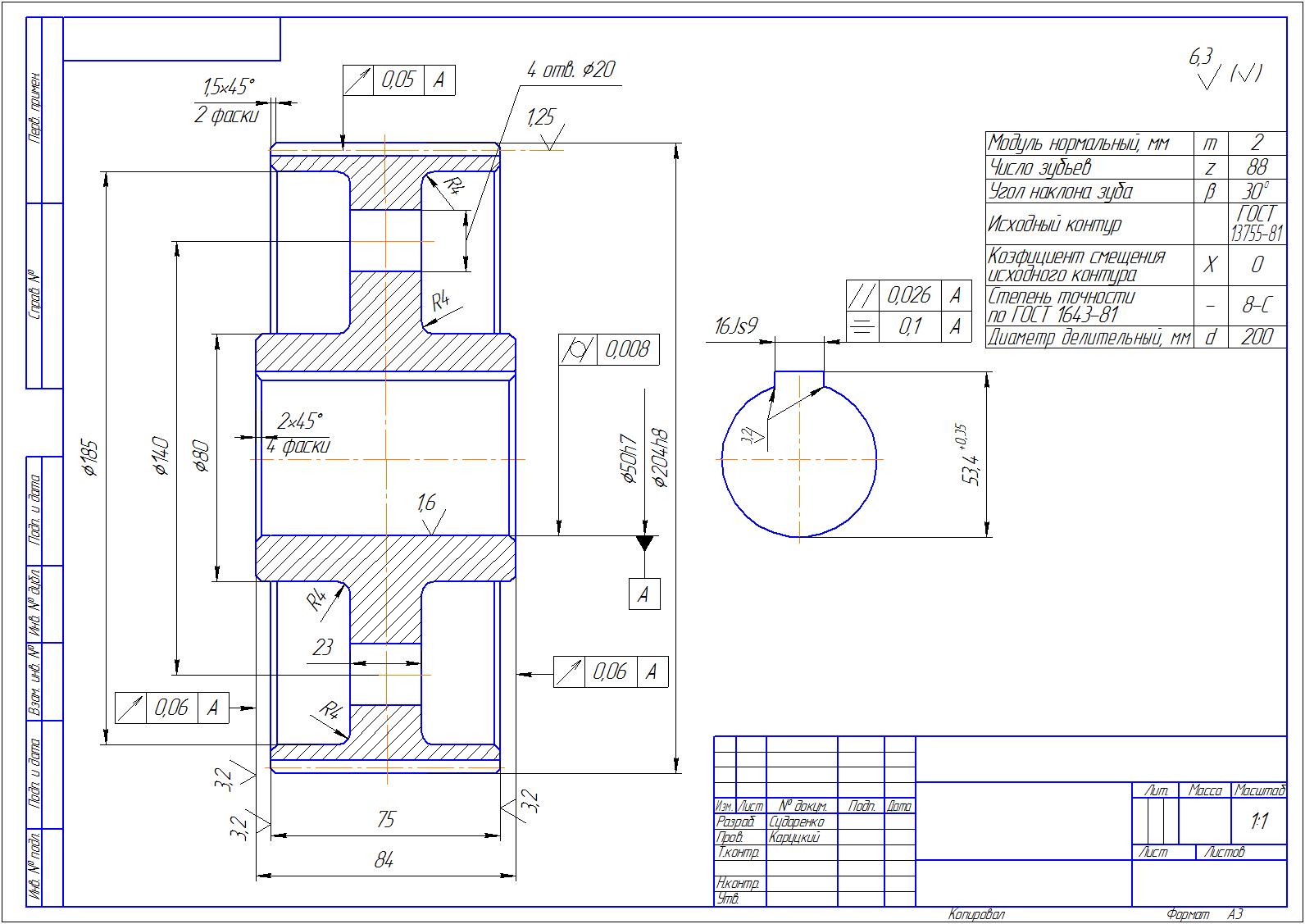
15.2 Рабочий чертеж вала с шестерней.
Введение
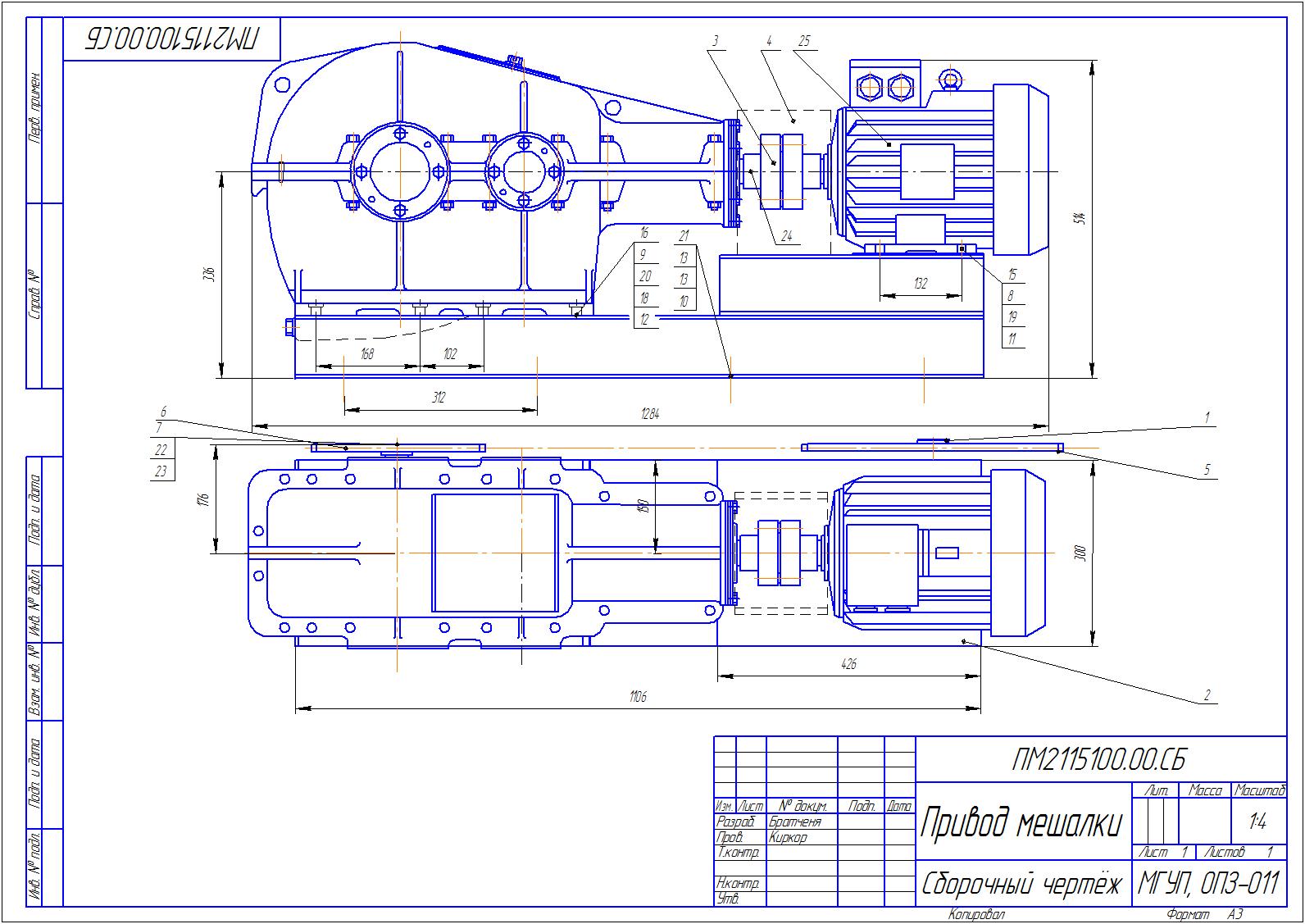
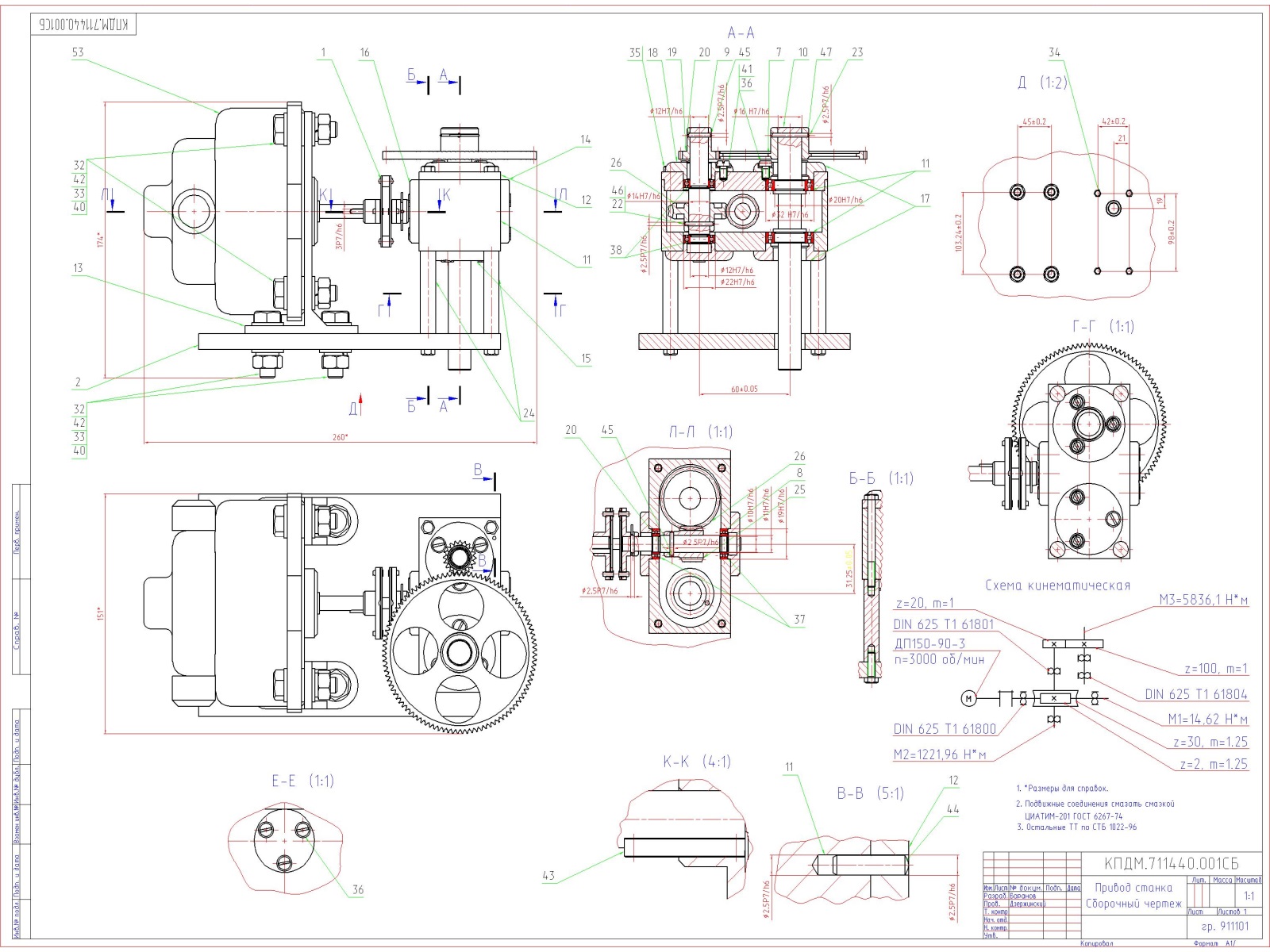
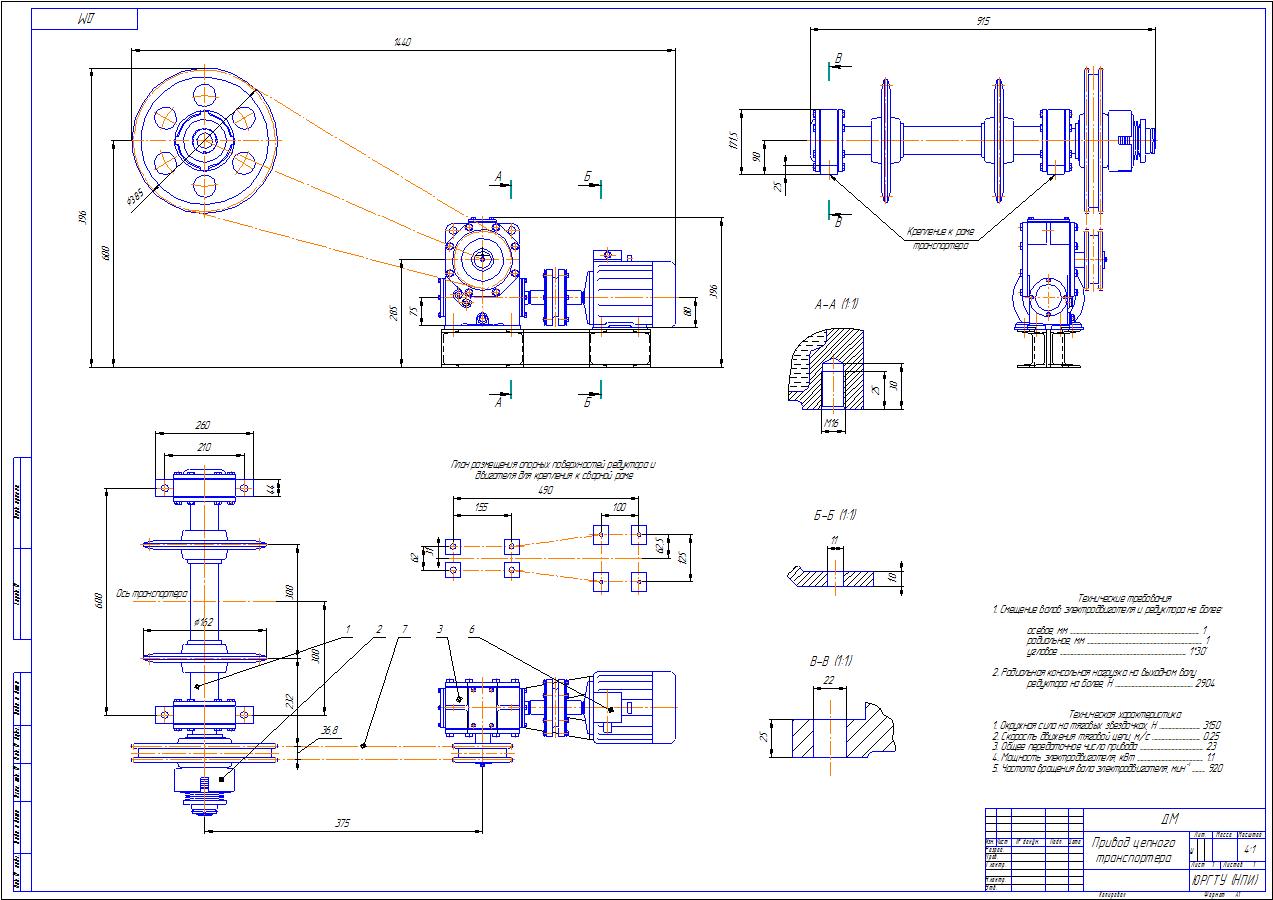
Редуктором называют механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины. Кинематическая схема привода может включать, помимо редуктора, открытые зубчатые передачи, цепные или ременные передачи. Указанные механизмы являются наиболее распространенной тематикой курсового проектирования.
Назначение редуктора – понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим. Механизмы для повышения угловой скорости, выполненные в виде отдельных агрегатов, называют ускорителями или мультипликаторами.
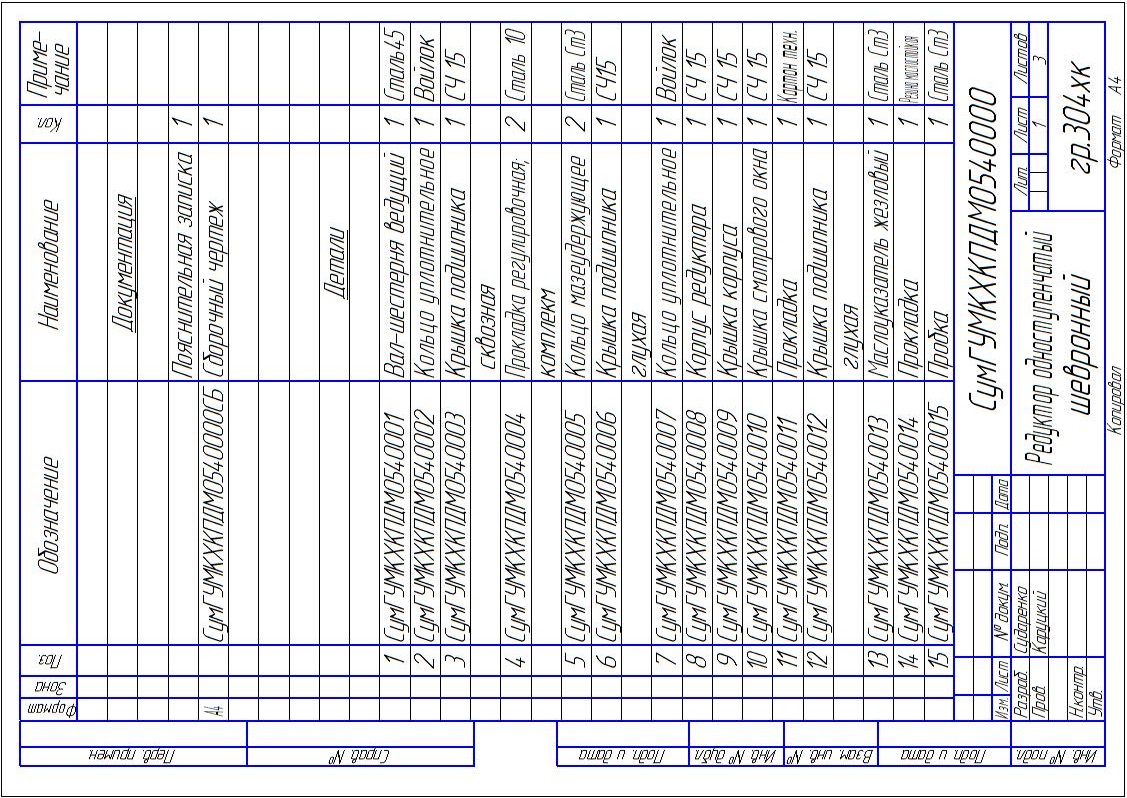
Редуктор состоит из корпуса (литого чугунного или сварного стального), в котором помещают элементы передачи – зубчатые колеса, валы, подшипники и т. д. В отдельных случаях в корпусе редуктора размещают также устройства для смазывания зацеплений и подшипников (например, внутри корпуса редуктора может быть помещен шестеренный масляный насос) или устройства для охлаждения (например, змеевик с охлаждающей водой в корпусе червячного редуктора).
Редуктор проектируют либо для привода определенной машины, либо по заданной нагрузке (моменту на выходном валу) и передаточному числу без указания конкретного назначения. Второй случай характерен для специализированных заводов, на которых организовано серийное производство редукторов.
Кинематические схемы и общие виды наиболее распространенных типов редукторов представлены на рис. 2.1-2.20 [Л.1]. На кинематических схемах буквой Б обозначен входной (быстроходный) вал редуктора, буквой Т – выходной (тихоходный).
Редукторы классифицируют по следующим основным признакам: типу передачи (зубчатые, червячные или зубчато-червячные); числу ступеней (одноступенчатые, двухступенчатые и т. д.); типу – зубчатых колес (цилиндрические, конические, коническо-цилиндрические и т. д.); относительному расположению валов редуктора в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развернутая, соосная, с раздвоенной ступенью и т. д.).
Возможности получения больших передаточных чисел при малых габаритах обеспечивают планетарные и волновые редукторы.
Литература
1. С.А Чернавский, И.М Чернин, Г.М. Ицкович, В.П. Козинцов. Курсовое проектирование деталей машин. 2-е изд., переераб. и доп. Москва. Машиностроение 1987
2. Р.А. Баласанян. Атлас деталей машин. Основа. 1996