

Оглавление.
1. Введение
1.1. Основные принципы автоматического регулирования
1.2. Основные задачи автоматической системы регулирования процесса горения на котлах
2. Основная часть.
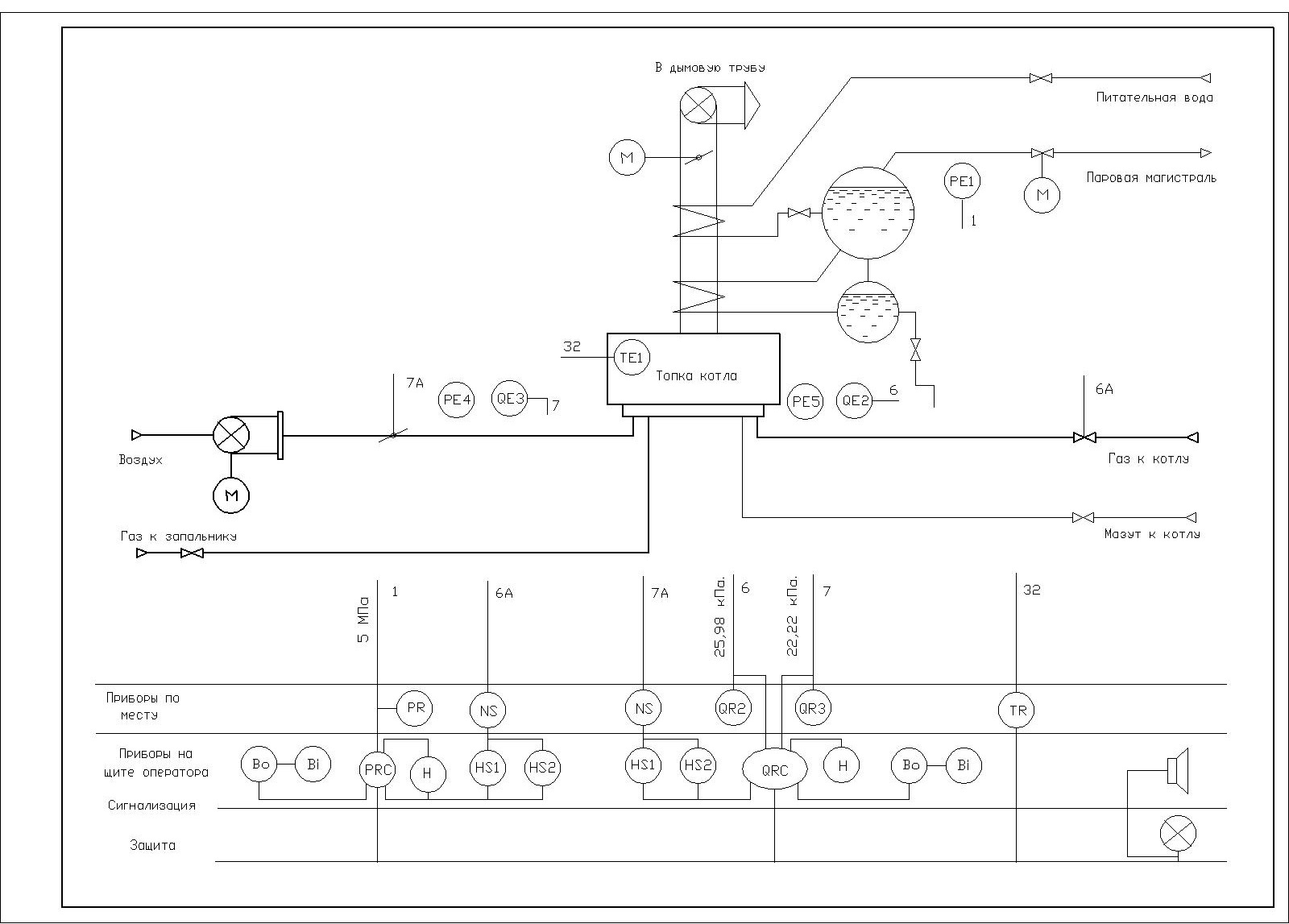
2.1. Автоматическое регулирование экономичности процесса горения (подачи воздуха)
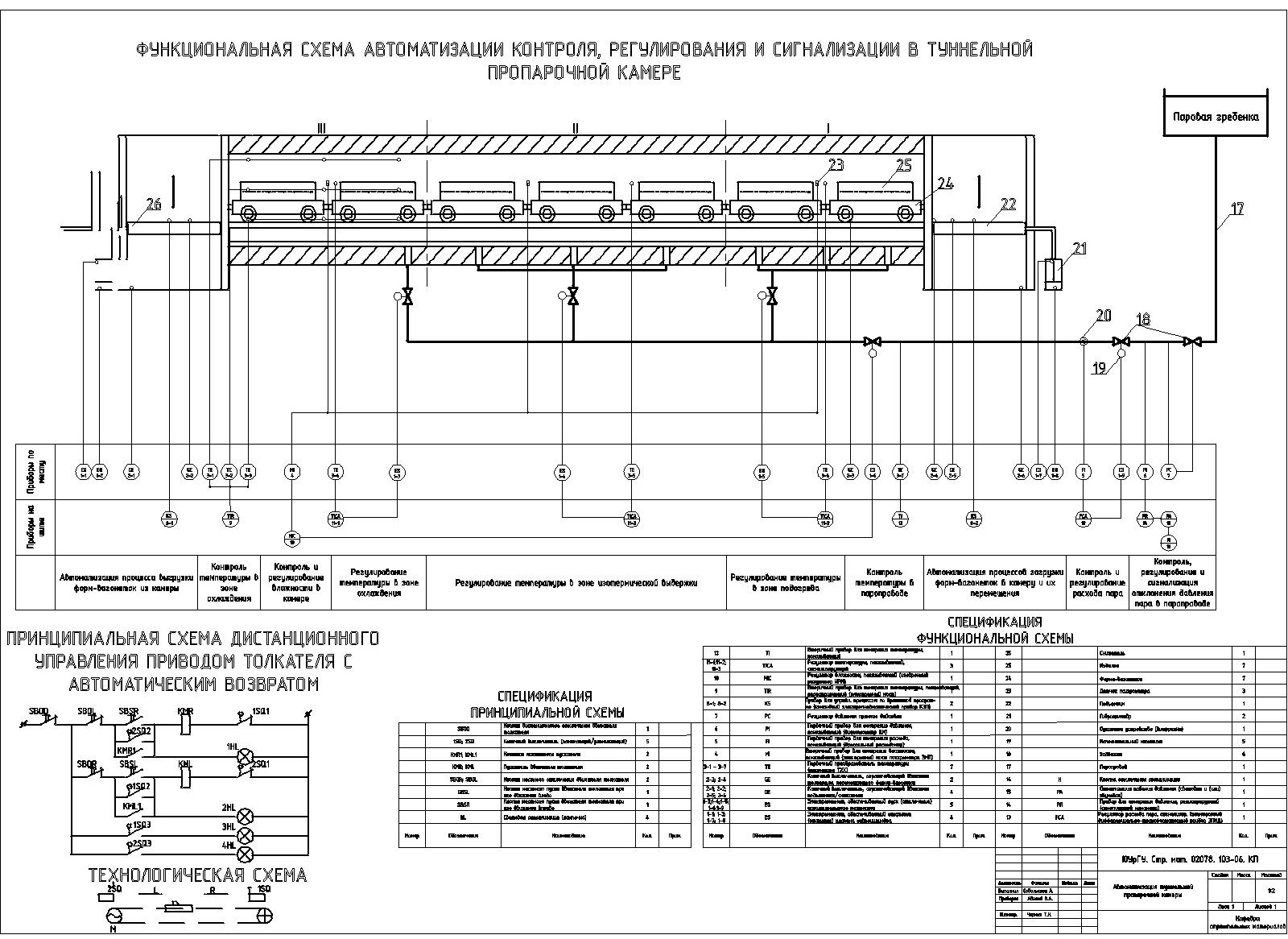
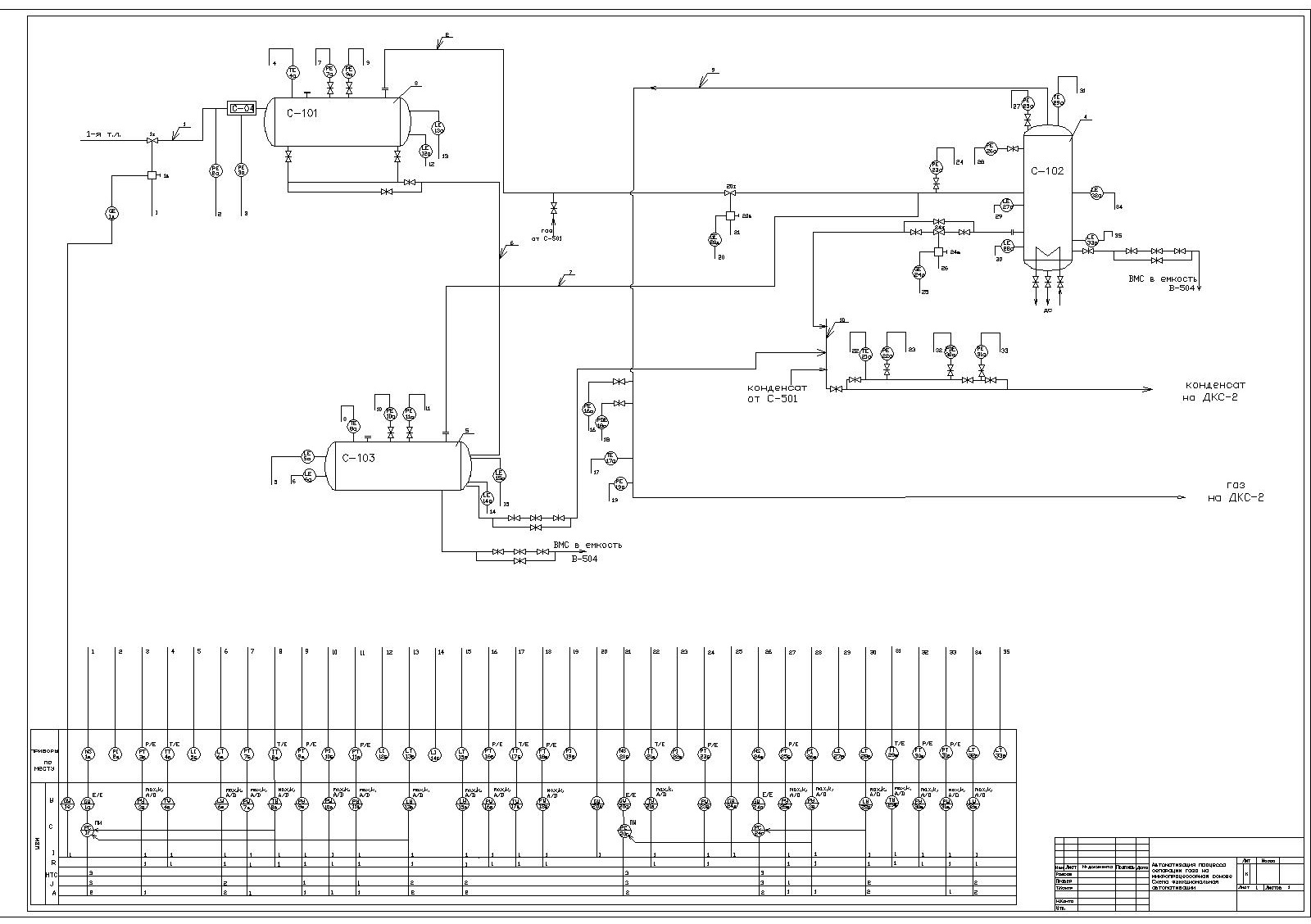
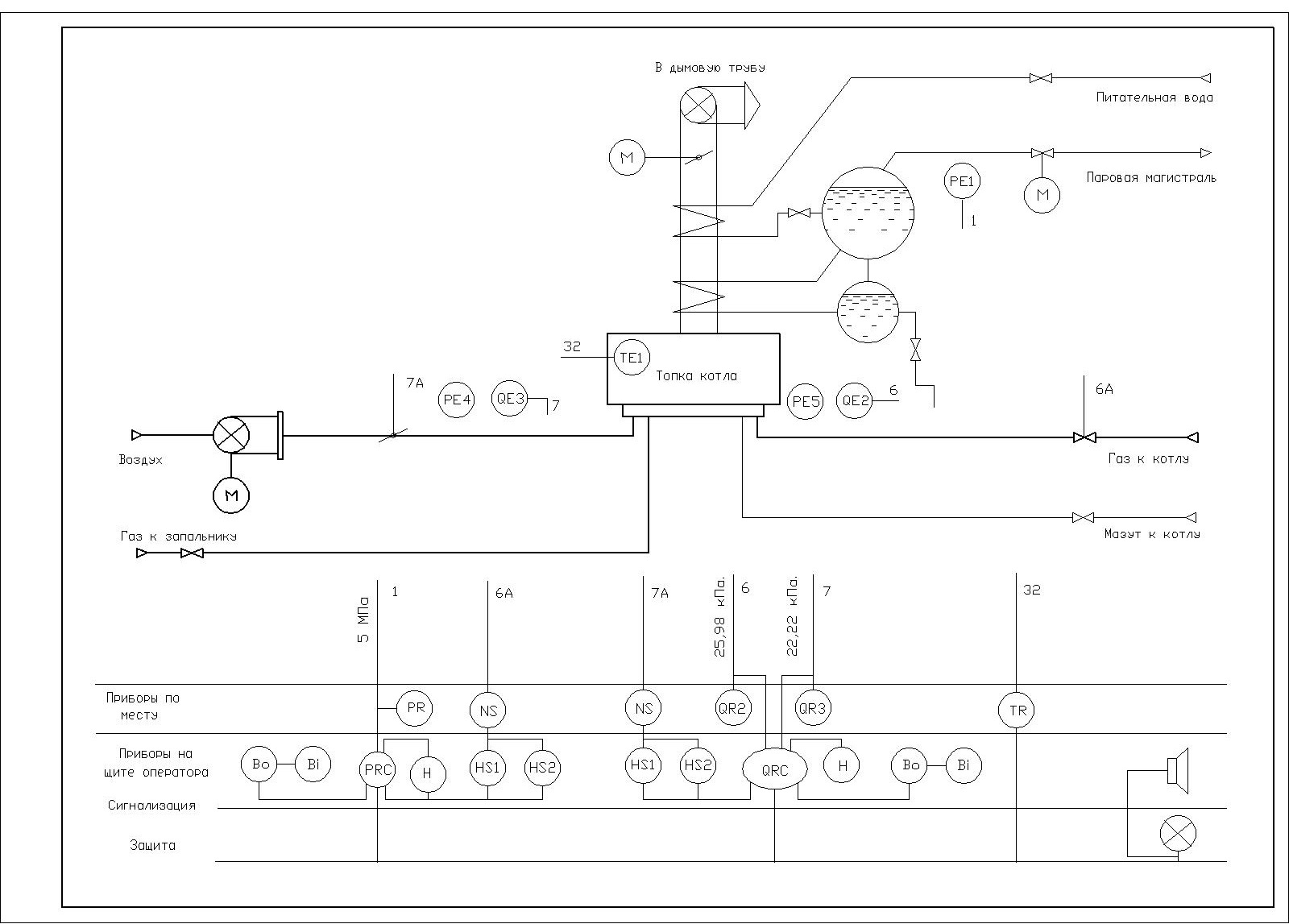
2.2. Описание функциональной схемы автоматизации объекта управления
2.3. Измерение расхода жидкости, газов или пара расходомерами с сужающим устройством
2.4 Подбор средств автоматизации для измерения давления и расхода газа, пара и воздуха
2.5.Выбор исполнительных механизмов
2.6 Подбор регуляторов
2.7 Подбор адаптера интерфейса
2.8 Выбор вторичных приборов
2.9. Анализ динамических свойств объекта
2.10. Построение и описание обобщенной функциональной и структурной схем системы автоматизации
2.11. Определение параметров объекта
2.12. Выбор параметров настройки регулирующего устройства
2.13. Расчет устойчивости системы автоматизации
3. Заключение
4. Список используемой литературы
1.Введение.
1.1. Основные принципы автоматического регулирования
Построение систем автоматического регулирования основывается на применении или комбинировании двух основных принципов регулирования.
Наиболее широкое распространение получил принцип автоматического регулирования по отклонению регулируемой величины от заданного значения . Достоинством таких систем является то, что регулируемая величина непрерывно находится под контролем регулятора. В то же время принцип регулирования по отклонению обладает существенным недостатком, состоящим в том, что регулятор вступает в действие лишь после появления рассогласования между заданным и действительным значениями регулируемой величины, что затрудняет обеспечение высокого качества переходного процесса. Такие системы в определенных условиях способны к самовозбуждению, приводящему к возникновению колебаний регулируемой величины.
Указанных недостатков лишены системы автоматического регулирования, построенные на принципе компенсацией возмущений. В таких системах регулятор получает информацию о действующих на объект возмущениях и через регулирующее воздействие компенсирует их влияние на объект. Системы с компенсацией возмущений позволяют достичь более высокого качества регулирования, чем системы, основанные на принципе регулирования по отклонению, поскольку регулятор вступает в действие еще до отклонения регулируемой величины. Такие системы называются разомкнутыми, так как регулятор не контролирует значение регулируемой величины Р, Недостаток этих систем состоит в том, что регулируемая величина может значительно отклониться от заданного значения. Кроме того, в реальных системах практически невозможно обеспечить измерение и компенсацию всех действующих на объект возмущений.
Наиболее совершенными являются комбинированные автоматические системы регулирования, использующие одновременно принципы по отклонению регулируемой величины и компенсации возмущений. При этом сохраняются преимущества обоих принципов регулирования и уменьшаются их недостатки.
4. Список используемой литературы.
1. Безлюдько В.Я. , Потапенко А.Н., Семернин А.Н.,- «Автоматизация тепловых процессов и установок» — методические указания к выполнению курсовой работы для студентовспециальности 10.08, — БелГТАСМ, Белгород 1994.
2. Безлюдько В.Я. , Потапенко А.Н., Семернин А.Н.,- «Автоматизация производственных процессов», — методические указания к выполнению дипломного проекта для студентов специальности 10.08, 17.05, 25.08, 29.06, 32.07 — БелГТАСМ, Белгород 1994.
3. Мануйлов П. Н., — «Теплотехнические измерения и автоматизация тепловых процессов», — М.-Л. Энергия. 1996.