



СОДЕРЖАНИЕ
Задание
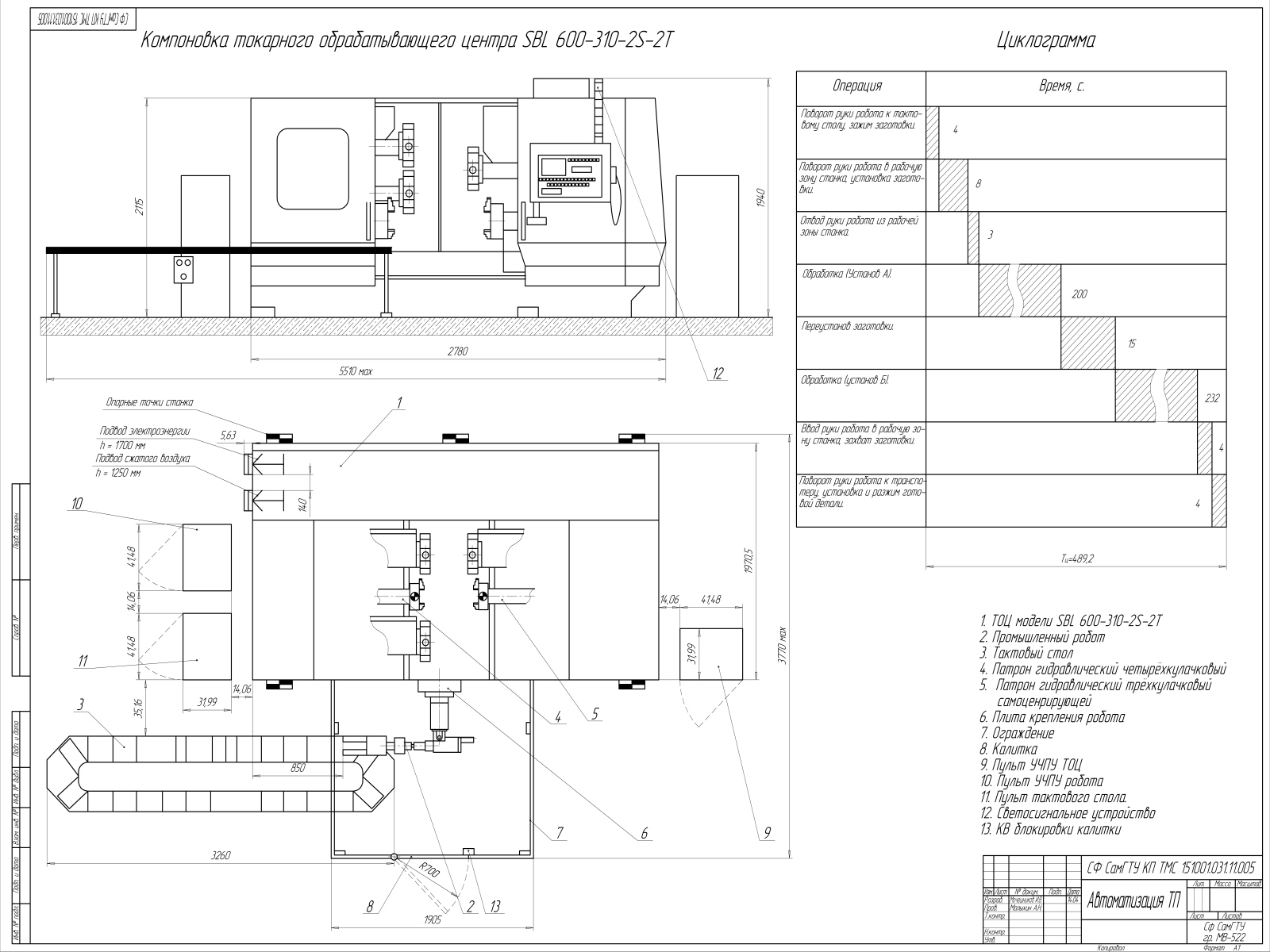
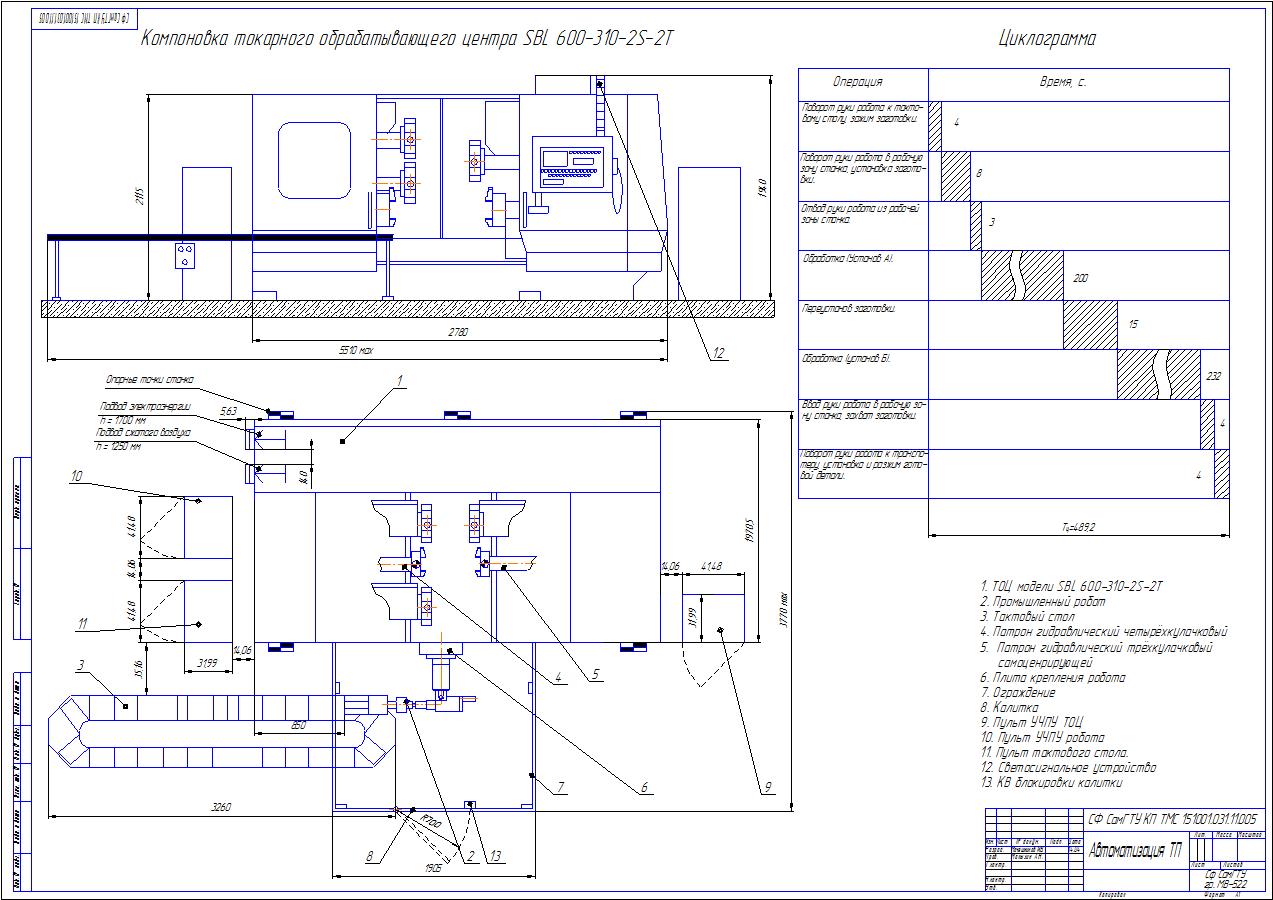
1 Станок токарный патронно-центровой с числовым программным управлением модели 16К20Ф3С32
2.1 Назначение и конструктивные особенности
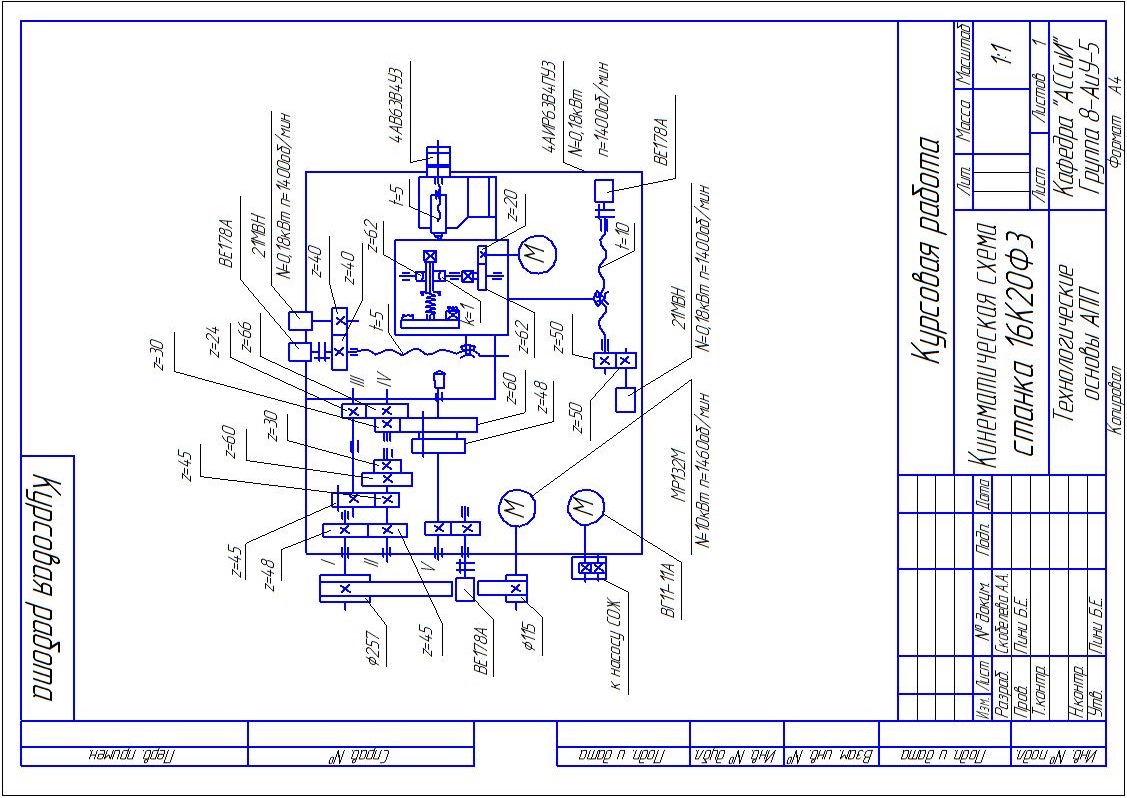
2.2 Описание кинематической схемы
2.3 Техническая характеристика токарного станка с ЧПУ модели 16К20Ф3С32
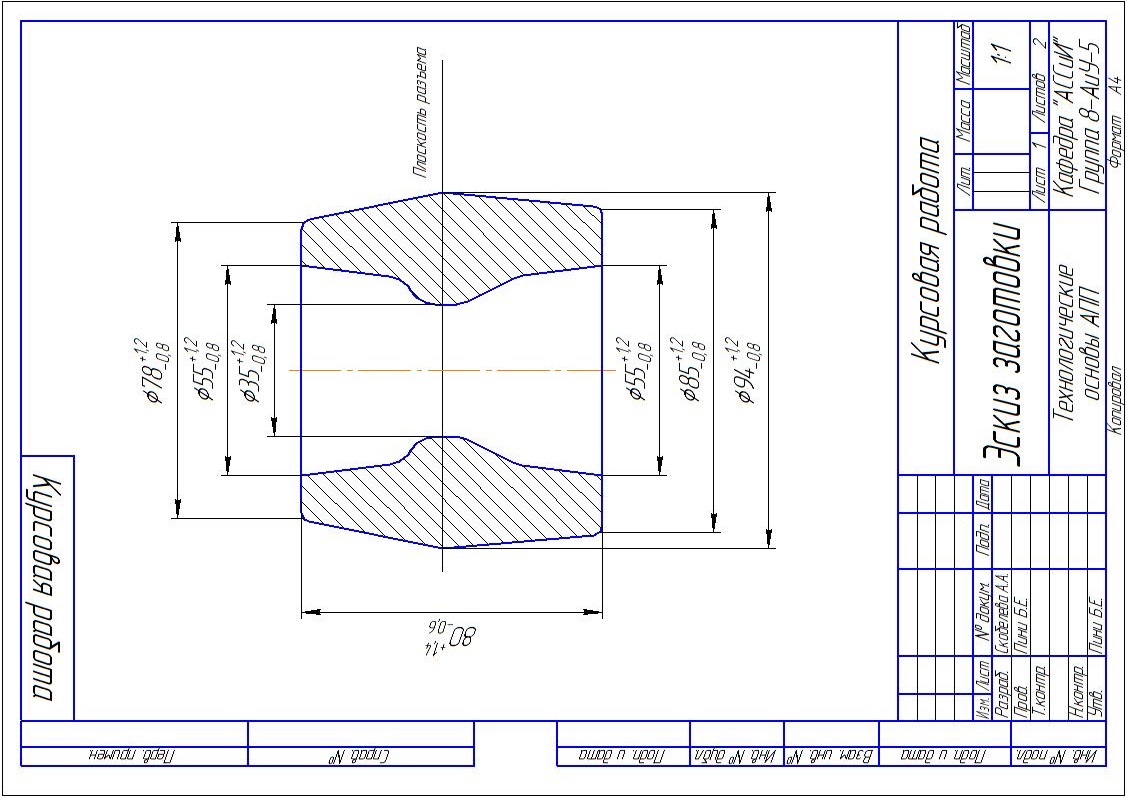
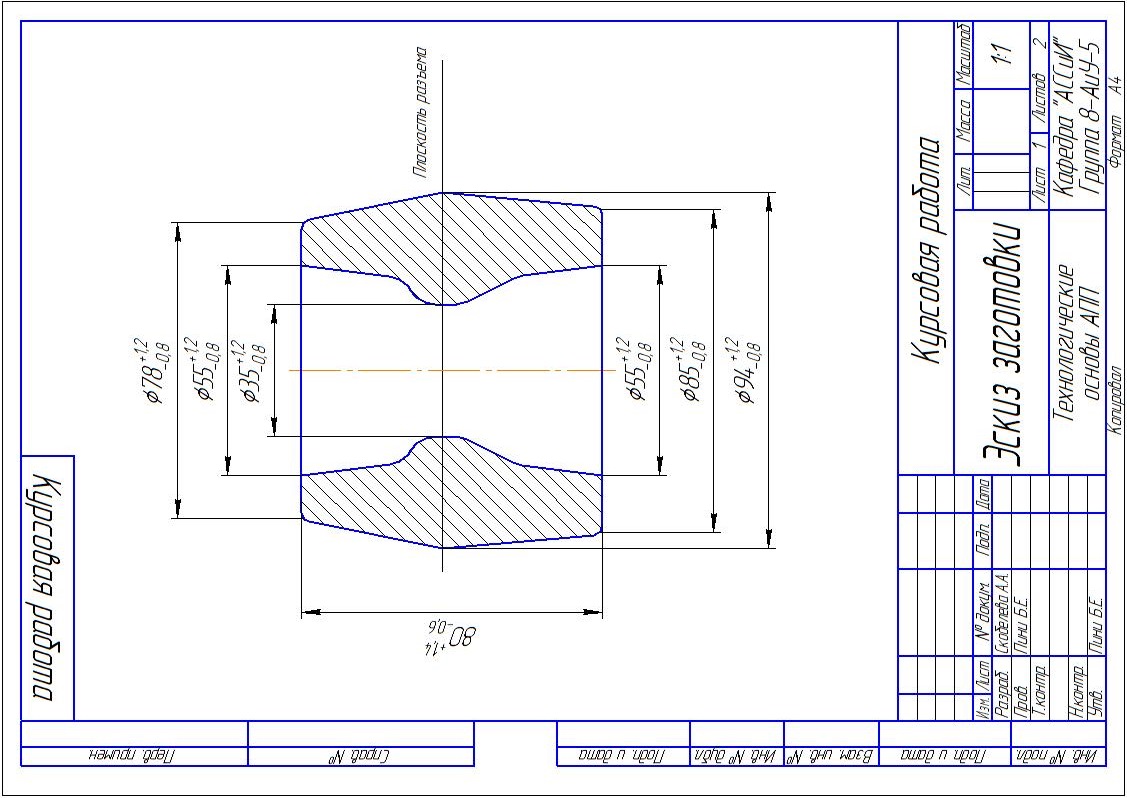
3 Выбор метода получения заготовки
4 Выбор способов механообработки
5 Выбор режущего инструмента
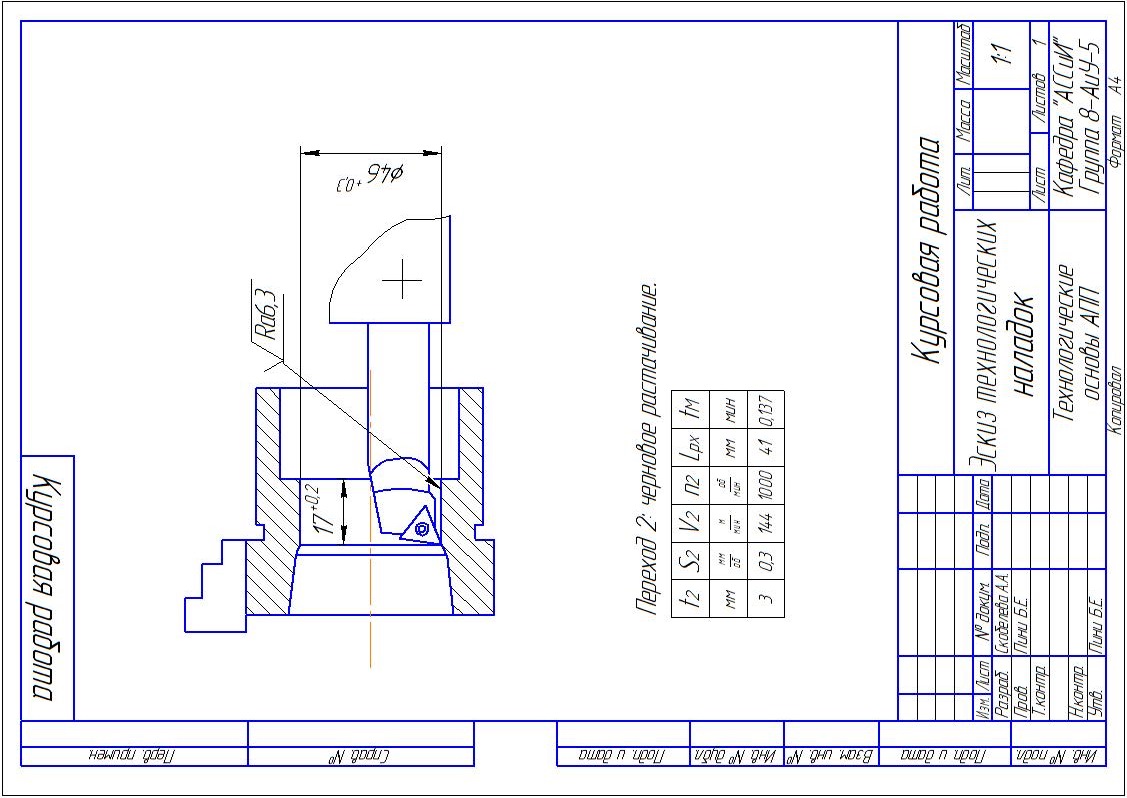
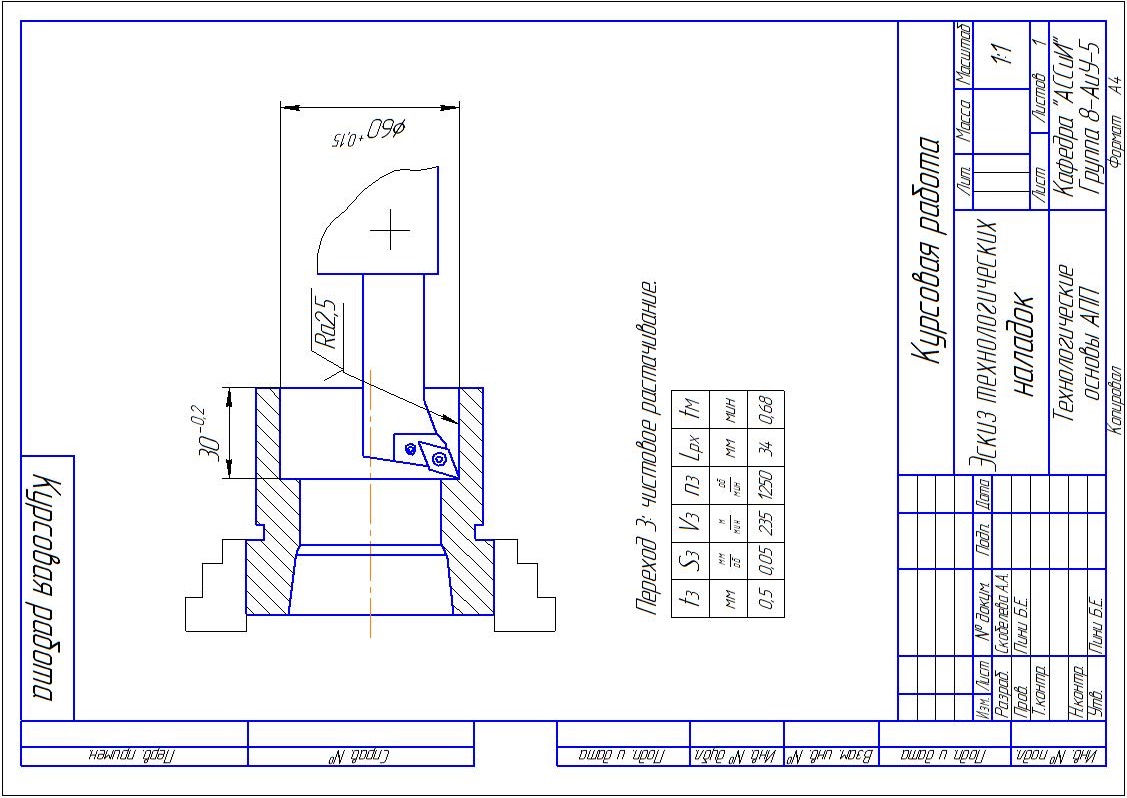
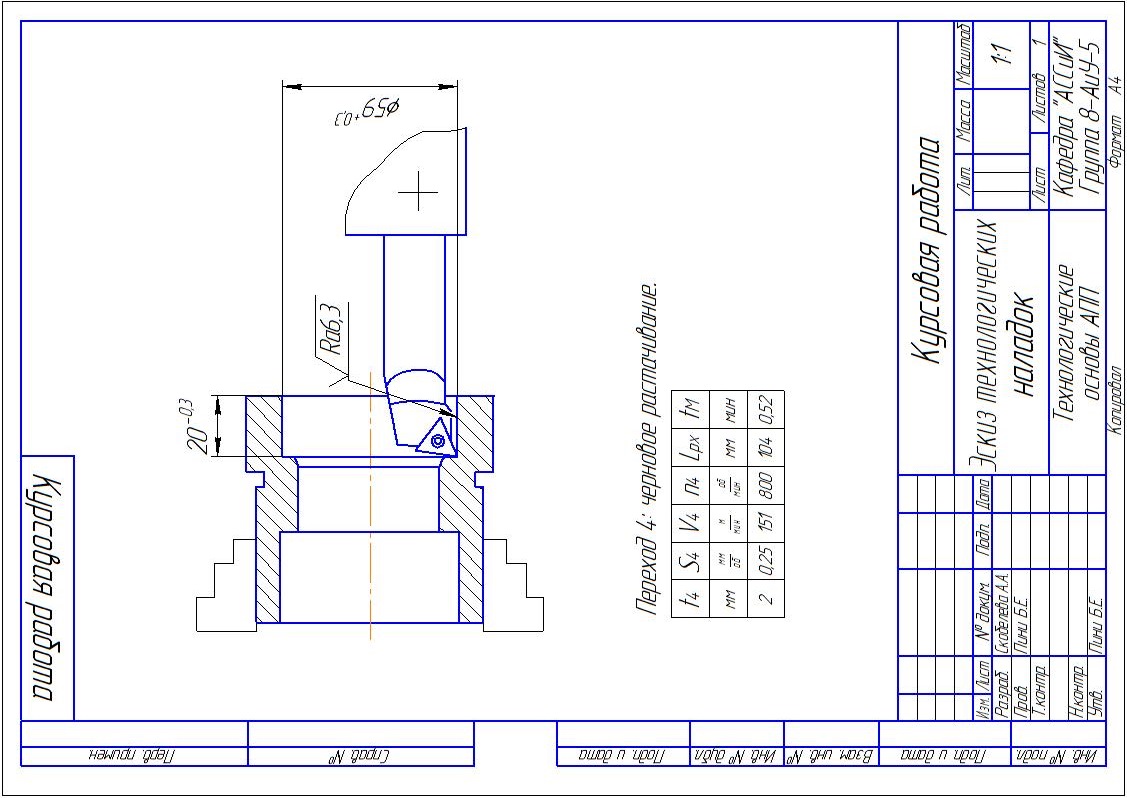
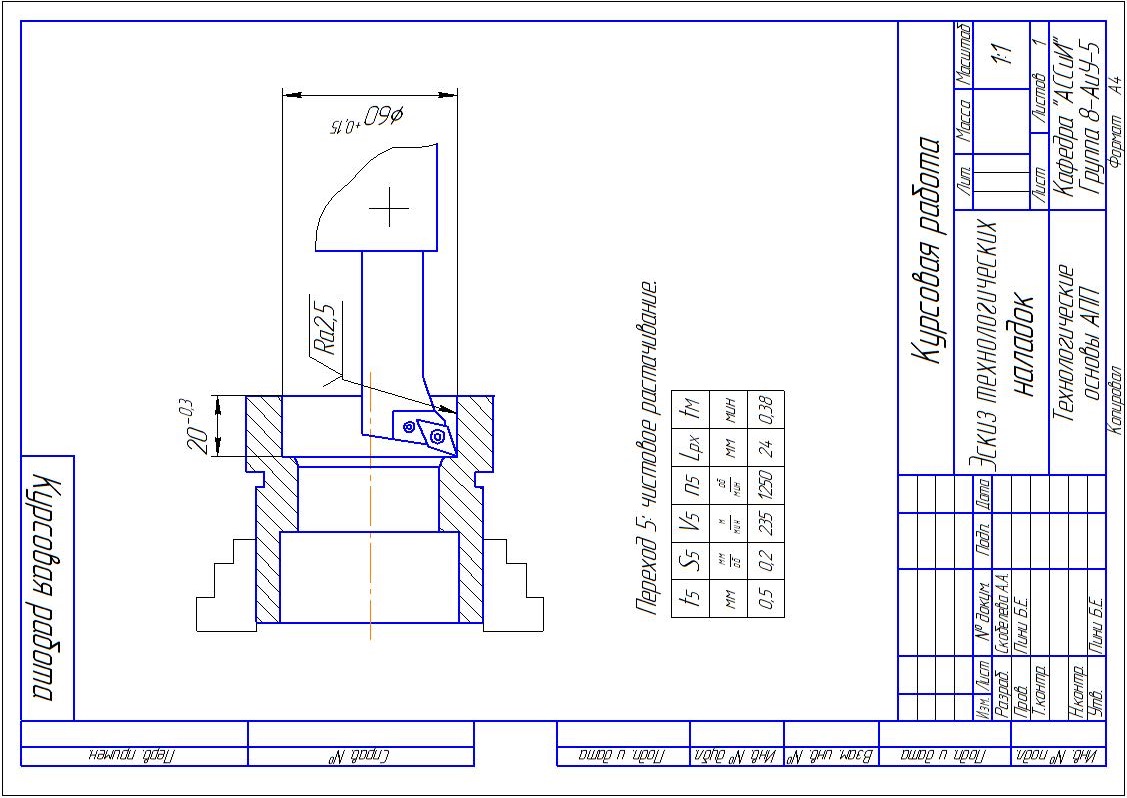
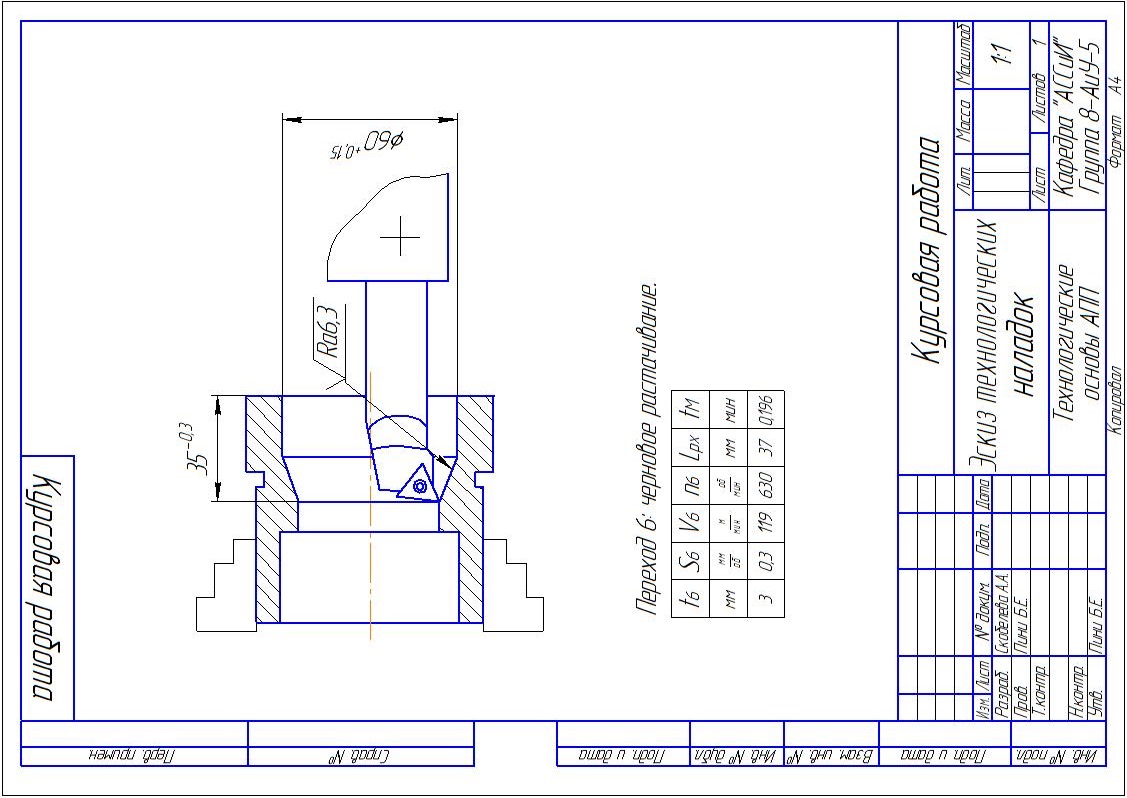
6 Расчет режимов резания и разработка технологических наладок
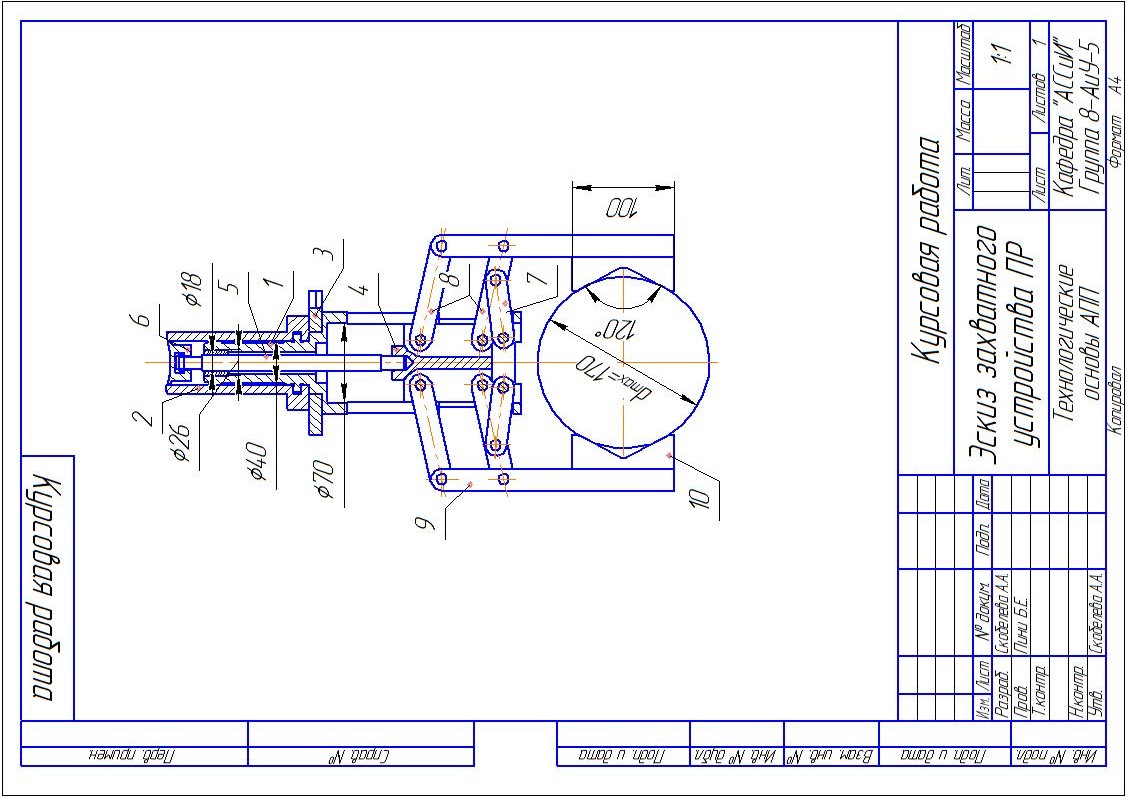
7 Выбор конструкции промышленного робота и расчет схвата руки ПР
7.1 Анализ исходных данных для выбора модели промышленного робота
7.2 Промышленный робот типа «Универсал-5»
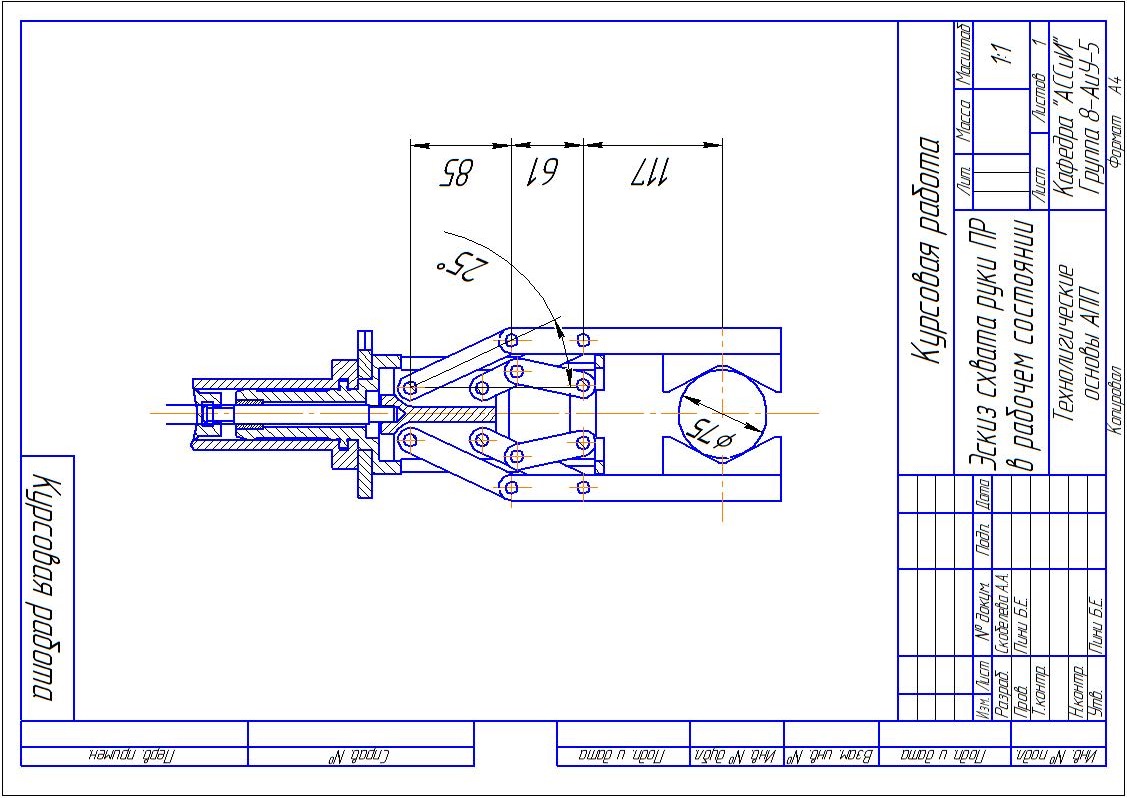
7.3 Выбор типа захватного устройства и расчет схвата руки промышленного робота
8 Вид транспортно-накопительной системы
8.1 Магазин-накопитель с зигзагообразным лотком
8.2 Расчет параметров накопителя
9 Список литературы
Список литературы:
1. Косилова А. Г. Мещеряков Р. К. Справочник технолога-машиностроителя. Машиностроение, 1985. т. 1
2. Косилова А. Г. Мещеряков Р. К. Справочник технолога-машиностроителя. Машиностроение, 1985. т. 2
3. Козырев Ю.Г. Промышленные роботы. Справочник. Машиностроение, 1988.
4. Барановский Ю. В. Режимы резания металлов. НИИТавтопром, 1995. — курсовая работа по технологии машиностроения
5. Станки с программным управлением и промышленные роботы/Под ред. С. Е. Локтевой.-2-е изд., перераб. и доп. –М.:Машиностроение, 1986. 320 с., ил.
6. Промышленные роботы в машиностроении: Альбом/ Ю. М. Соломенцев, К. П. Жуков, Ю. А. Павлов и др.–М.:Машиностроение, 1987. 140 с.
7. Пуш А.В., Толстов Н.П. Однооперационные манипуляторы в станкостроении: методические указания. МГТУ МАМИ, 1982